About SSHS Lab.
Members
- Professor
- Post-Doc. Researcher/Research Professor
- Ph.D. Students
- M.S. Students
- Alumni
- Lab Secretary
- Exchange Students and Undergraduates
Publications
- Publications
- International Journal
- International Conference
- Domestic Journal
- Domestic Conference
- Thesis and Dissertation
- Invited Lectures and Seminar
- Patent
- Honors and Awards
- Technical Notes
Research
- Research
- Shock & Vibration Control
- Space Structure
- AI-based Smart System
- Flapping Wing Air Vehicles
- Hardware we have developed
Projects
Lectures
KAIST-UVARC
Lab Blog
a. Magnetic Levitation based self-learning MAV
AI-based Smart System

 Research
AI-based Smart System
a. Magnetic Levitation based self-learning MAV
Research
AI-based Smart System
a. Magnetic Levitation based self-learning MAV
a. Magnetic Levitation based self-learning MAV
Principal Investigator: Jae-Hung Han
International Collaboration: Charlie P. Ellington, Yoshiyuki Kawamura
Participated Graduate Research Assitant: Yeol-Hun Sung
Related Projects: NRF
Summary:
‘Pseudo Flight Environment (PFE)’ is a test environment that emulates free flight test for a MAV based on wind tunnel tests using a magnetic levitation device. The magnetic levitation device of the PFE levitates the MAV in the test section of the wind tunnel without any mechanical support using magnetic forces and moments, eliminating any airflow interferences. In addition, magnetic forces and moments can be individually reduced or removed for each degree of freedom. This characteristic makes it possible to separately analyze the longitudinal or lateral flight characteristics of the MAV. When all magnetic forces and moments are removed, of course, the MAV is exposed to emulated free flight environment instantaneously. If the states of the MAV become unstable during the tests, the MSBS may re-support the MAV using magnetic forces and moments to ensure the safety of the MAV.Related Recent Publication:
- [1] Dong-Kyu Lee, Jun-Seong Lee, Jae-Hung Han, Yoshiyuki Kawamura, and Sang-Joon Chung, “Development of a Simulator of a Magnetic Suspension and Balance System,” IJASS, vol.11, no.3, pp.175-183, 2010, [DOI]
- [2] Jae-Hung Han, Dong-Kyu Lee, Jun-Seong Lee, and Sang-Joon Chung, “Teaching Micro Air Vehicles How to Fly as We Teach Babies How to Walk,” JIMSS, vol.16, no.3, pp.263-278, 2013, [DOI]
- [3] Dong-Kyu Lee, Jun-Seong Lee, Jae-Hung Han, and Yoshiyuki Kawamura, “Dynamic Calibration of Magnetic Suspension and Balance System for Sting-free Measurement in Wind Tunnel Tests,” JMST, vol.27, no.7, pp.1963-1970, 2013, [DOI]
- [4] Dong-Kyu Lee, Jun-Seong Lee, Jae-Hung Han, and Yoshiyuki Kawamura, “System Identification and Controller Design of a Micro Air Vehicle using Magnetic Suspension and Balance System,” GNC 2011.
- [5] Dong-Kyu Lee, and Jae-Hung Han, “Flight Controller Design of a Flapping-Wing MAV in a Magnetically Levitated Environment,” ICRA 2013.
1. Goal
To Propose a New Method for the Design Process of Flight Control Systems for MAVs- System identification & design of SCAS for MAVs under safety guaranteed flight test through wind tunnel test using magnetic levitation device
2. Approaches
Magnetic Levitation Device- A device that can levitate an experimental model, which is magnetized or has magnets inside, using magnetic forces and moments generated by its electromagnets.
- This device has, heretofore, mainly been used for the flow visualization or precise forces/moments measurement during wind tunnel tests eliminating flow interference caused by mechanical supports.

Configuration of Magnetic Suspension and Balance System
- Levitation of experimental models – Cylinder Model(Left), Fixed-wing MAV Model(Right)
Efficient System Identification of MAV
- The aerodynamic forces and moments for various attitude angles and control variables of the MAV model can be measured in a wind tunnel without any support interference using the magnetic levitation device as a non-contact type balance.
- The perturbed equation of motion of the model can be constructed based on the results from the wind tunnel tests.
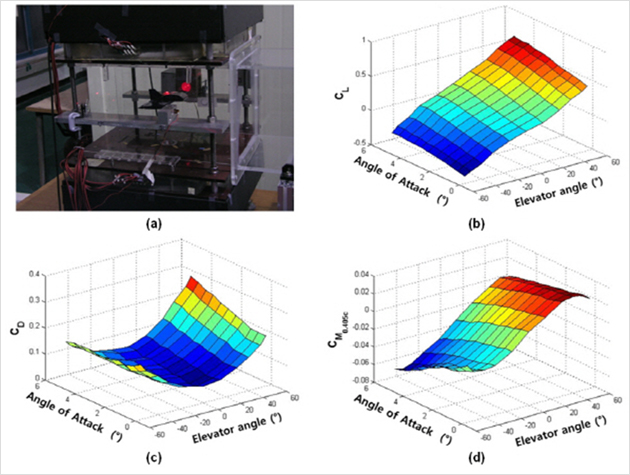
Wind tunnel test of small flight vehicle model(a), Aerodynamic coefficients of the SFV model for various angles of attack and elevator deflection angles(b~d)
Degree of Freedom Adjustment
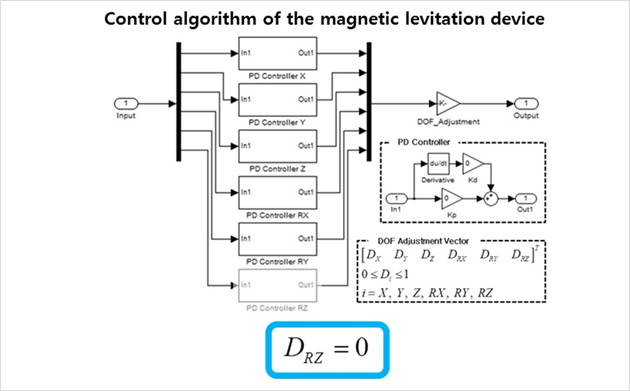
- The magnetic constraint forces and moments of the magnetic levitation device are proportional to its control commands calculated from the control algorithms for each DOF.
- By changing the values of the DOF adjustment vector, the magnetic constraint forces and moments for an arbitrary selected DOF can be reduces or removed.
- If we set Dz as zero, the MAV model can move freely in z direction.

Safety Guaranteed Flight Test
- Under PFE, a SCAS of the MAV can be tested for performance verification. While the magnetic forces and moments for levitation of the MAV are being gradually reduced, the SCAS attempts to create stable states for the MAV. If the SCAS does not adapt well enough to maintain steady flight causing the MAV to become unstable, the magnetic levitation device of PFE secures the vehicle and the same procedure can be repeated with redesigned SCAS. After this iterative process, design of SCAS for the MAV can be completed under a safer environment.
- It is generally believed that application of learning algorithm for design and implementation of a SCAS for an UAV is very difficult because they must be airborne in order to train the control system. However, this is simplified with the PFE because the safety of an MAV is guaranteed without any support interferences. This testing methodology is highly akin to the parental guidance in infantile walking .
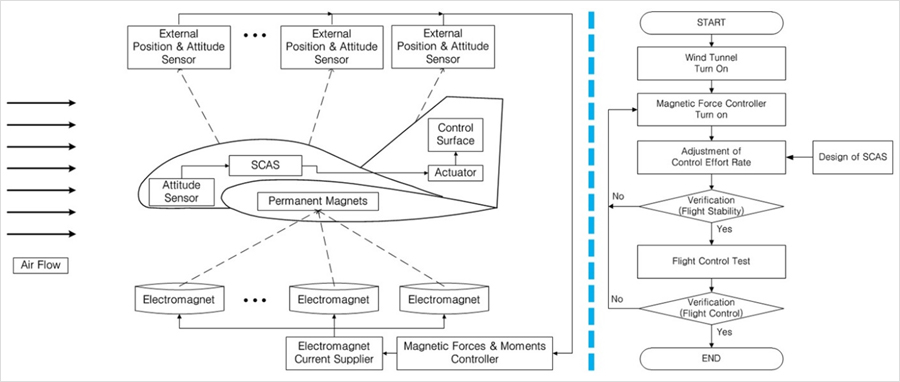
A typical configuration of Pseudo Flight Environment
- Demonstration of DOF Adjustment and Safety Guaranteed Flight Test #1

- Demonstration of DOF Adjustment and Safety Guaranteed Flight Test #2
COPYRIGHT BY Smart Structures & H/W Systems Lab. ALL RIGHTS RESERVED.





