About SSHS Lab.
Members
- Professor
- Post-Doc. Researcher/Research Professor
- Ph.D. Students
- M.S. Students
- Alumni
- Lab Secretary
- Exchange Students and Undergraduates
Publications
- Publications
- International Journal
- International Conference
- Domestic Journal
- Domestic Conference
- Thesis and Dissertation
- Invited Lectures and Seminar
- Patent
- Honors and Awards
- Technical Notes
Research
- Research
- Shock & Vibration Control
- Space Structure
- AI-based Smart System
- Flapping Wing Air Vehicles
- Hardware we have developed
Projects
Lectures
KAIST-UVARC
Lab Blog
b. Experimental approach and Hardware Development of FW vehicles
Flapping Wing Air Vehicles

 Research
Flapping Wing Air Vehicles
b. Experimental approach and Hardware Development of FW vehicles
Research
Flapping Wing Air Vehicles
b. Experimental approach and Hardware Development of FW vehicles
b. Experimental approach and Hardware Development of FW vehicles
Principal Investigator: Jae-Hung Han
Participating Researcher: Reynolds Addo-Akoto, Hyeon-Ho Yang, Sang-Gil Lee, Yujeong Han
Related Projects: NRF-UVARC(한국연구재단-무인이동체원천기술개발사업단)
Summary:
Bioinspired ornithopter research group in the SSHS Lab. ultimately pursues the development of agile, stable, and autonomous ornithopter platforms, motivated from the flight mechanism/control strategy of biological flyers. We are seeking efficient methodologies for modeling structural, aerodynamic, and flight dynamic characteristics of ornithopters through investigating semi-empirical flapping-wing aerodynamic model, modal-based flexible multi-body dynamics, and system identification strategy using Magnetic Suspension and Balance System (MSBS). For more detailed research activities, refer to the contents below or our multimedia channel.Related Recent Publication:
- Addo-Akoto, R., Han, J.-S., and Han, J.-H., “Roles of wing flexibility and kinematics in flapping wing aerodynamics,” Journal of Fluids and Structures, Vol. 104, 103317, July 2021.
- Han, J.-S. and Han, J.-H., “A contralateral wing stabilizes a hovering hawkmoth under a lateral gust,” Scientific Reports, Vol. 9, pp. 393-406, Oct. 2019
- Addo-Akoto, R., Han, J.-S. and Han, J.-H., “Influence of aspect ratio on wing–wake interaction for fapping wing in hover,” Experiments in Fluids, Vol. 60, No.11, Article ID 164, Oct. 2019.
- Han, J.-S., Kim, H.-Y. and Han, J.-H., “Interactions of the wakes of two flapping wings in hover,” Physics of Fluids, Vol. 30, Issue 2, Article ID 021901, Feb. 2019.
- Kim, H.-Y., Han, J.-S. and Han, J.-H., “Aerodynamic effects of deviating motion of flapping wings in hovering flight,” Bioinspiration & Biomimetics, Vol. 14, No. 2, Article ID 026006, Feb. 2019
Bioinspired Ornithopter
1.Goals
- Design and build hardware prototypes of innovative ornithopters capable of flight
- Effectively predict the flight dynamics of the ornithopters through flexible multi-body dynamics and flapping-wing aerodynamic modeling approaches
2. Approaches
- Computer-based design approach for the SF-3 development
3. Research Achievements
SF-3 design and development- Computer-based design approach for the SF-3 development
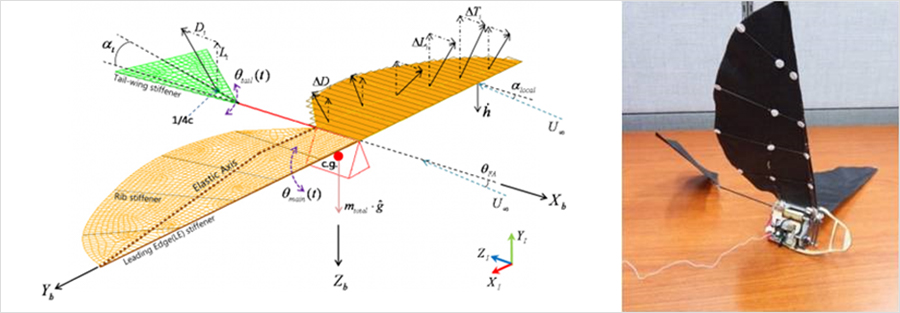
SSHS Lab ornithopter, SF-3 simulation model and HW prototype
SSHS Lab ornithopter SF-3 HSC recording for pitch attitude tracking experiment
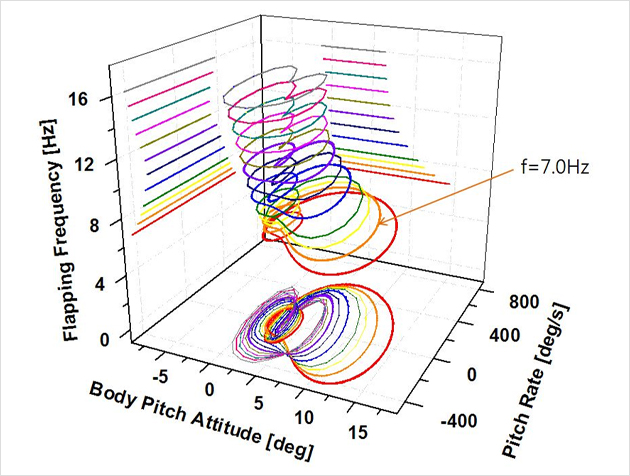
- Inherently oscillatory flight states at trimmed flights due to the flapping motion
- Multiple trim conditions with respect to the wing beat frequency (characterized as a stable limit-cycle oscillation)
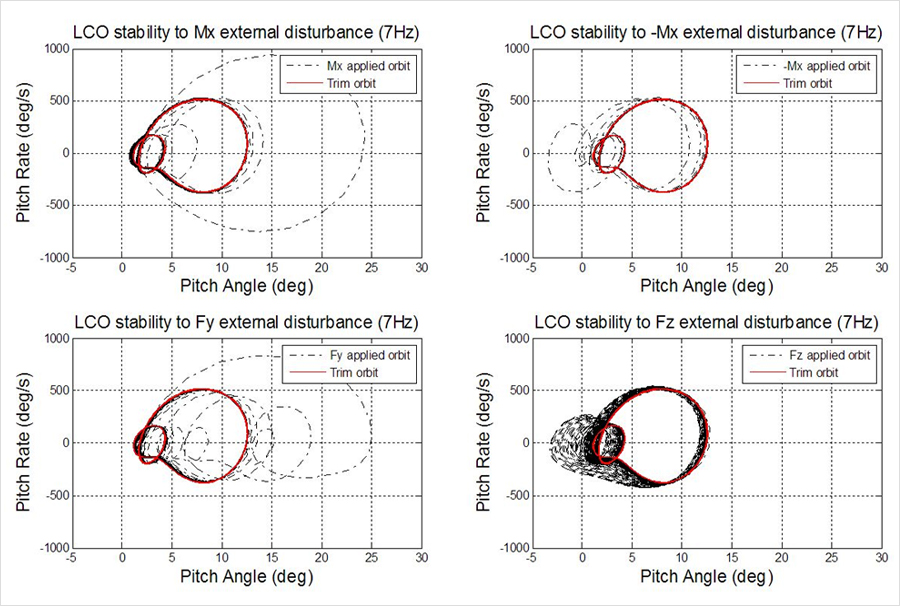
- Stable limit-cycle trim trajectories: recovered to trim condition after the disturbance
Experimental approach to study flight dynamics of FWMAVs
1.Goals
- Experimentally study the dynamic flight characteristics of bioinspired MAVs.
- Analyze the wake patterns for better understanding of various lift enhancement mechanisms
2. Approaches
- Build dynamically scaled-up robotic models equip with sensors (2 and 3-DoF models)
- Experimentally simulate the hovering and forward flight conditions in water tank environment
- Digital particle image velocimetry (DPIV) technique for flow visualization
3. Research Achievements
Aerodynamic Characteristics and Flow Visualization of an Insect-like Flapping Wings- Accurately measure the aerodynamic forces and moments using rigid and flexible wings
- Analyzed the flight dynamics from the aerodynamic forces and moments
- Built robust semi-empirical aerodynamic models
Hovering Flight with PIV Analysis
Forward Flight Test using Flapping Robot
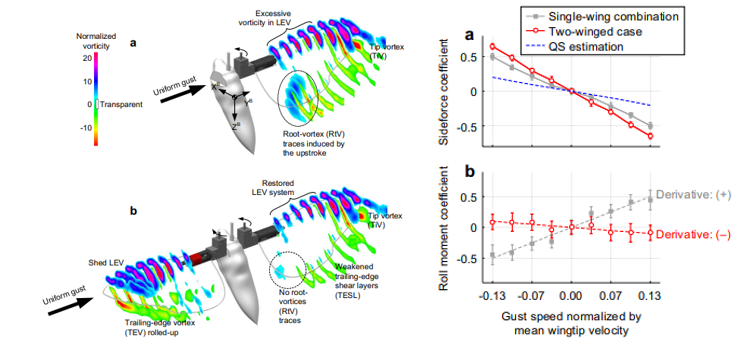
Effect of contralateral wing on the vorticity distribution and stability derivatives
COPYRIGHT BY Smart Structures & H/W Systems Lab. ALL RIGHTS RESERVED.





